








友情提示
本站部分转载文章,皆来自互联网,仅供参考及分享,并不用于任何商业用途;版权归原作者所有,如涉及作品内容、版权和其他问题,请与本网联系,我们将在第一时间删除内容!
联系邮箱:1042463605@qq.com
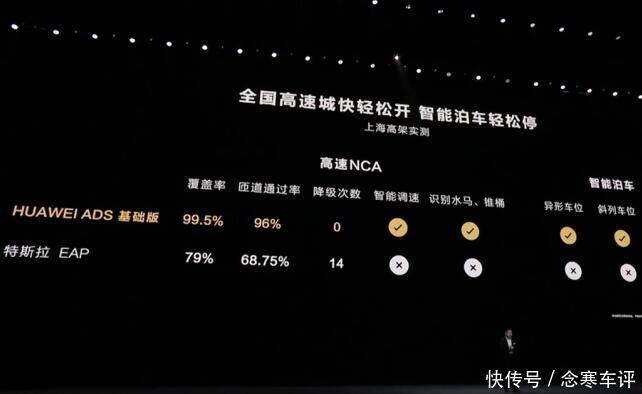
特斯拉被撼动了?华为视觉智驾有新突破,高速领航与泊车技术领先
31
0
相关文章
近七日浏览最多
最新文章
标签云
极氪
算法
电动车
自动驾驶
埃隆_马斯克
特斯拉公司
方案董事长余承东
特斯拉
美国
美国商务部
智能驾驶
车位
ipo
美国证券交易委员会
智能网联
马斯克
广汽
广汽集团
中国软件
国家安全
智能汽车
美国政府
中国
电动汽车
优步
芯片
英伟达
擎天柱
人工智能
刘强东
马化腾
无人机
京东
王炸
世界首富
人脸识别
道路交通安全法
广州
辅助系统
蔚来
华为
小巴
动力电池
小鹏汽车
何小鹏
waymo
网约车
alphabet
通用汽车
基金经理
天眼查
一线城市
股价
港元
soc
机器人
pi
日本
车祸
墨西哥
踏板
方向盘
无人驾驶
普京
车臣
埃隆马斯克
拉姆赞卡德罗夫
手机
余承东
市场份额
huawei
北京
刘阳
李洁
米莱
总统
阿根廷
米尔斯特约夫斯基
穆斯塔法
小卡德罗夫
拜登
白宫
共和党
中国高铁
特朗普集团
唐纳德特朗普
无框车门
罗永浩
朱晓彤
保险
新能源
ev
电动机
电动皮卡
德国
roadster
新能源汽车
金融界
雷达
微软
亚马逊
科技
美股
皮薄馅大
mpv
鉴定
名誉权
刹车失灵
达芬奇
蒙娜丽莎
最后的晚餐
成吉思汗
高通
骁龙
联发科
台积电
芯片自研
全大核架构
公司实现营业收入
任正非
智能手机
手机市场
巴西
爱因斯坦
罗杰施密特
白手套
处理器
芯片领域
华盛顿
国产芯片
芯片制造商
问界
续航
SUV
操作系统
受害者
纯血鸿蒙
实况照片
租金
租房
房源
房租
李明
上海市
上海青浦
苹果公司
苹果手机
苹果设备
禁止入内
iphone
三折叠屏手机
孟晚舟
轮值董事长
吉林省
不为什么
折叠价格
项立刚
孙凝晖
中科院
大连
思科
赔偿
ibm
科技巨头
裁员风暴
中东
黎巴嫩
斯诺登
bp机
皇帝
手机壳
杨昊
手表
全红婵
劳力士
大屏幕
三星电子
手机行业
卷曲屏手机
折叠
平板电脑
新品发布会
非凡
帝王
奏折
八方来财
激战
路透社
apple
三星
黑科技
屏幕铰链
手机售价
华仔
刘德华
演唱会
袁启聪
猥亵
结婚
美女
教师
酒店
ofo
板块
七夕
小鹏
续航里程
毫米波雷达
牛米
奇瑞
智能互联
ktv
自动泊车
中型suv
重庆
防空系统
蚊子
昆虫
无人区
卫星
被动安全
ds
无线充电
东风风神
navi
证券
爱卡汽车
街拍
宁德时代
磷酸铁锂电池
净现金流
毛利率
理想汽车
清华大学
北京市
国产车
anc
皓影
honda
涡轮增压发动机
本田
无级变速